El objetivo de este estudio es verificar la precisión que se puede obtener con el Marlyn Cobalt Drone en modo PPK, comparando los resultados con los puntos de control del terreno (GCPs) en la ortofoto generada.
¿Qué es un elemento de texto enriquecido?
El elemento de texto enriquecido le permite crear y dar formato a títulos, párrafos, citas en bloque, imágenes y vídeos, todo en un solo lugar en lugar de tener que añadirlos y darles formato individualmente. Sólo tienes que hacer doble clic y crear contenido fácilmente.
Prueba
Edición de contenidos estáticos y dinámicos
Un elemento de texto enriquecido puede utilizarse con contenido estático o dinámico. Para el contenido estático, basta con soltarlo en cualquier página y empezar a editarlo. Para el contenido dinámico, añada un campo de texto enriquecido a cualquier colección y luego conecte un elemento de texto enriquecido a ese campo en el panel de configuración. Y ya está.
Cómo personalizar el formato de cada texto enriquecido
Los títulos, los párrafos, las citas en bloque, las figuras, las imágenes y las leyendas de las figuras pueden ser estilizados después de añadir una clase al elemento de texto enriquecido utilizando el sistema de selector anidado "When inside of".
prueba
H1
H2
H3
H4
H5
Los títulos, los párrafos, las citas en bloque, las figuras, las imágenes y las leyendas de las figuras pueden ser estilizados después de añadir una clase al elemento de texto enriquecido utilizando el sistema de selector anidado "When inside of".
Objetivos del proyecto
El objetivo de este estudio es verificar la precisión que puede obtenerse con el Marlyn Cobalt Drone & PPK, comparando los resultados con los puntos de control medidos previamente en la ortofoto generada.
Flujo de trabajo del proyecto e instrumentos utilizados
Receptor GNSS
El receptor GNSS es un dispositivo de alta precisión utilizado para la medición y el posicionamiento por satélite. Diseñado con tecnología avanzada, el receptor puede recibir señales de satélites GPS, GLONAS, GALILEO y Beidou, lo que le permite proporcionar una posición precisa y fiable incluso en condiciones de señal débil o entornos difíciles.
Puntos de Control Terrestre (PCT)
Los puntos de control terrestre (GCP) son puntos de referencia que se establecen sobre el terreno y se utilizan en fotogrametría para corregir la distorsión que puedan presentar las imágenes de los drones. Los GCP se colocan en lugares estratégicos y se miden con equipos de medición precisos, como receptores GNSS o estaciones totales, para obtener sus coordenadas exactas en el sistema de referencia utilizado.
En esta ocasión, los GCPs se utilizarán como puntos de control para comprobar la precisión de la ortofoto generada por el Marlyn Cobalt utilizando su Topcon PPK integrado. La posición de los GCPs medidos en el campo será comparada con la posición de los mismos GCPs en la ortofoto generada, de esta forma será posible determinar cuánto error hay entre los GCPs y lo que aparece en la ortofoto. Esta información será valiosa para evaluar la precisión del dron y del proceso de fotogrametría utilizado para obtener la ortofoto.
GNSS SATLAB SL700 / Puntos de control terrestre (GCP)
Atmos Marlyn Cobalt Drone
Atmos Marlyn Cobalt es un dron de ala fija utilizado en topografía, cartografía y fotogrametría. Con un diseño aerodinámico y un sistema de propulsión eléctrico, este dron es eficiente energéticamente, prometiendo 40-50 minutos de vuelo. El Marlyn Cobalt admite diferentes sensores, ya sean RGB, multiespectrales o térmicos, lo que permite capturar datos específicos y obtener una comprensión detallada del terreno. Capaz de operar en una amplia gama de entornos, este dron es fácil de transportar y montar. Con capacidad de vuelo autónomo, puede seguir una ruta específica y capturar datos precisos sin piloto a bordo.
Atmos Marlyn Cobalt Drone
Sensor de la cámara SONY RX1RII
El sensor SONY RX1RII es una cámara compacta de alta resolución que se utilizó como componente del dron Atmos Marlyn . Este sensor cuenta con un sensor CMOS de 35 mm con 42,4 megapíxeles, lo que le permite capturar imágenes nítidas y detalladas en una amplia gama de condiciones de luz.
El sensor SONY RX1RII está diseñado para trabajar en aplicaciones de topografía, cartografía y fotogrametría, ya que cuenta con un rápido objetivo de apertura f/2.0 que permite una mayor captación de luz y una mayor profundidad de campo. Además, el sensor cuenta con una avanzada tecnología de autoenfoque y opciones de ajuste manual, lo que permite un mayor control y personalización de la captura de imágenes. En el momento de la publicación, Atmos ha mejorado la Sony RX1RII, que ha llegado al final de su vida útil, y la ha sustituido por el sensor A7RIV de 61 MP, que ofrece una cobertura de área mejorada e imágenes oblicuas con un objetivo Zeiss Ventum de 21 mm. Sin embargo, la A7RIV queda fuera del ámbito de este estudio.
Atmos Marlyn Cobalt Drone con cámara Sony RX1RII
Atmos Navigator (Software de planificación de vuelos)
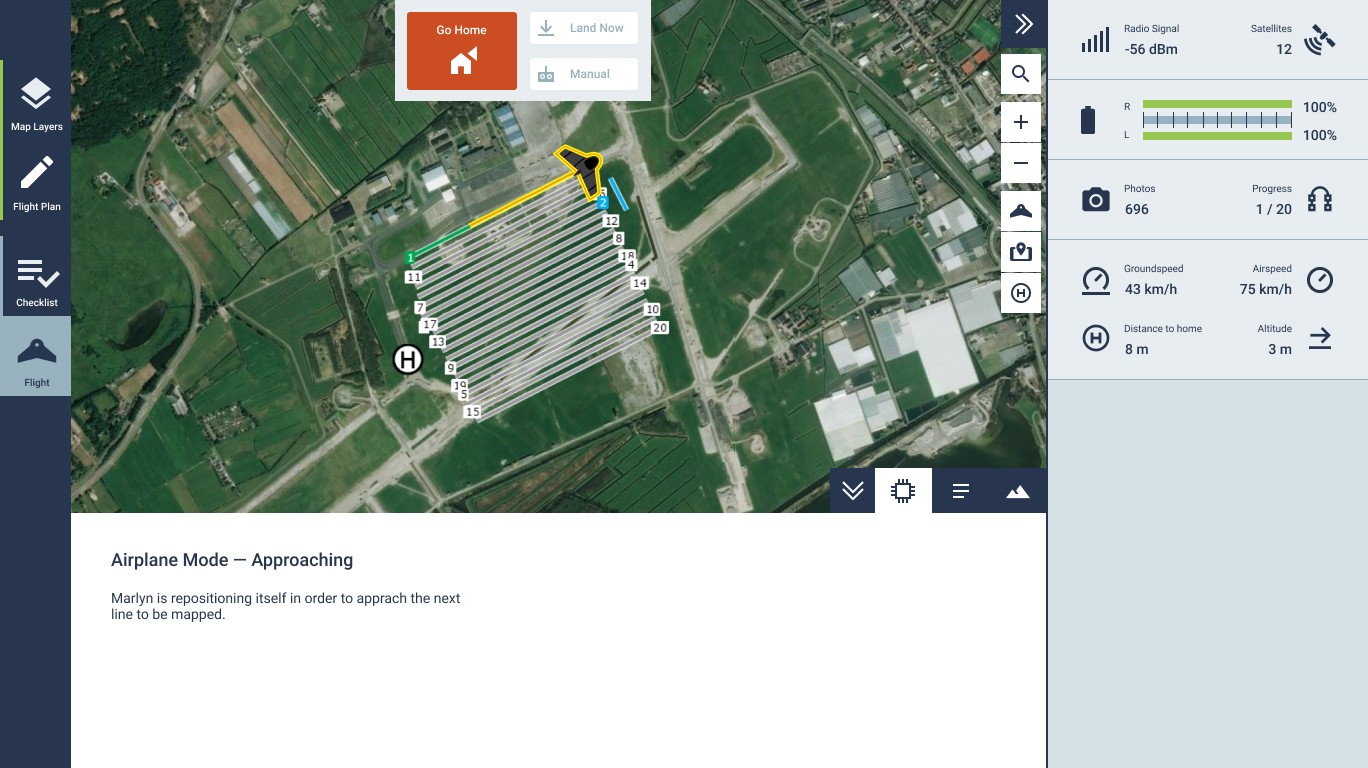
Atmos Navigator es un software diseñado para planificar y controlar misiones de vuelo para aplicaciones de topografía, cartografía y fotogrametría. Ofrece una interfaz de usuario fácil de usar y permite a los usuarios crear misiones personalizadas para capturar imágenes precisas. Este software es una herramienta esencial para la planificación y el control de misiones con drones, que permite a los usuarios obtener datos precisos de forma eficiente y eficaz con el dron Marlyn Cobalt .
Atmos Navigator Software
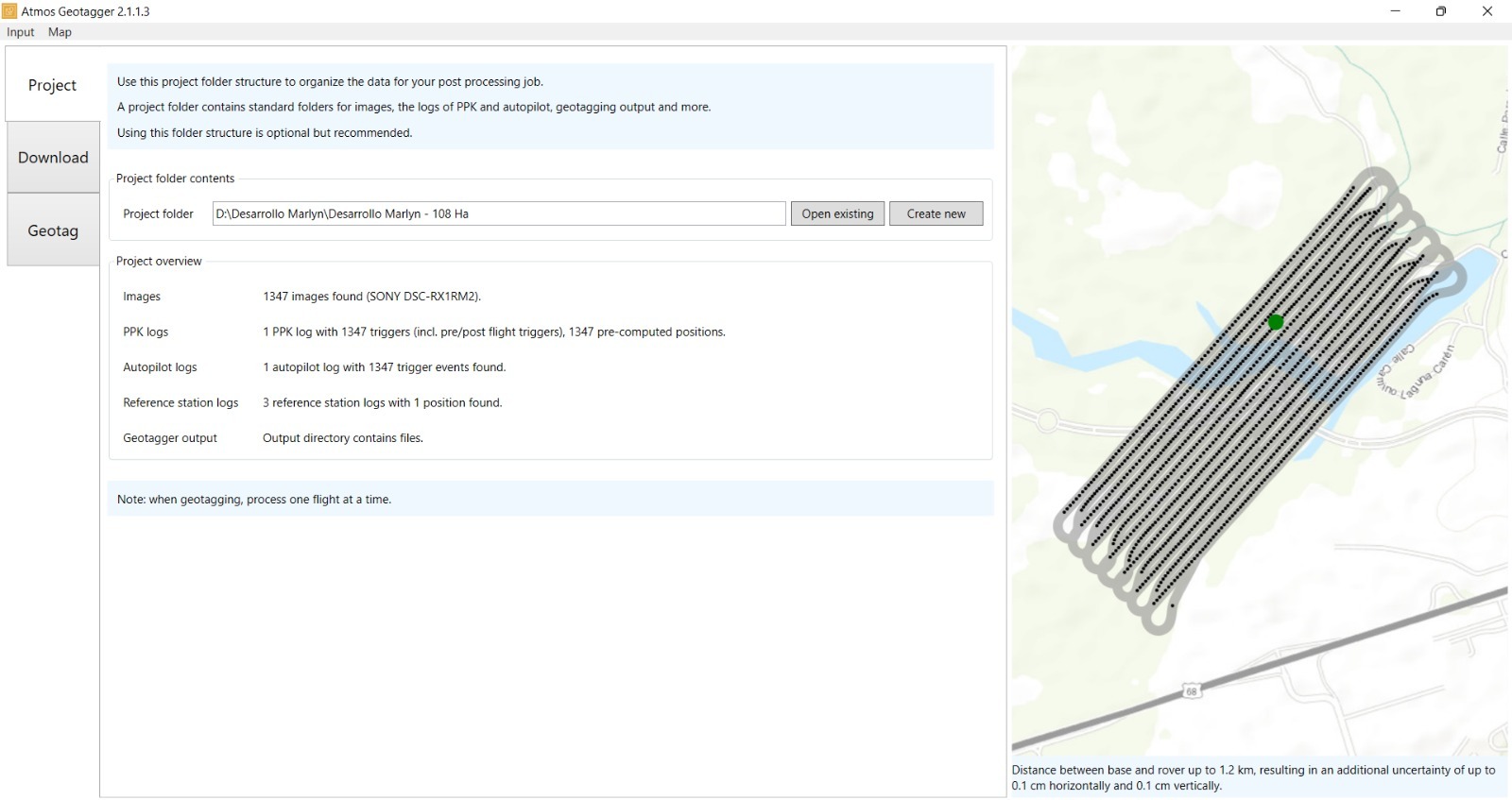
Atmos Geotagger (Software)
Atmos Geotagger El software V2 es una herramienta de georreferenciación PPK para imágenes captadas por Marlyn Cobalt que sincroniza y ajusta la posición GPS de las imágenes para generar geoetiquetas x,y,z precisas en cm para cada imagen. La aplicación importa imágenes y archivos de registro GPS de la misión, sincroniza las imágenes con los datos de posición GPS y georreferencia cada imagen con precisión en función de su posición y orientación. Además, permite procesar grandes cantidades de datos de forma eficiente y ofrece una vista previa de las imágenes procesadas y la opción de exportarlas a otros programas de software de procesamiento y análisis. Por todo ello, el software Geotagger v2 es una herramienta crucial para la gestión de datos de drones y para generar resultados precisos en aplicaciones de topografía, cartografía y fotogrametría.
Atmos Geotagger Software
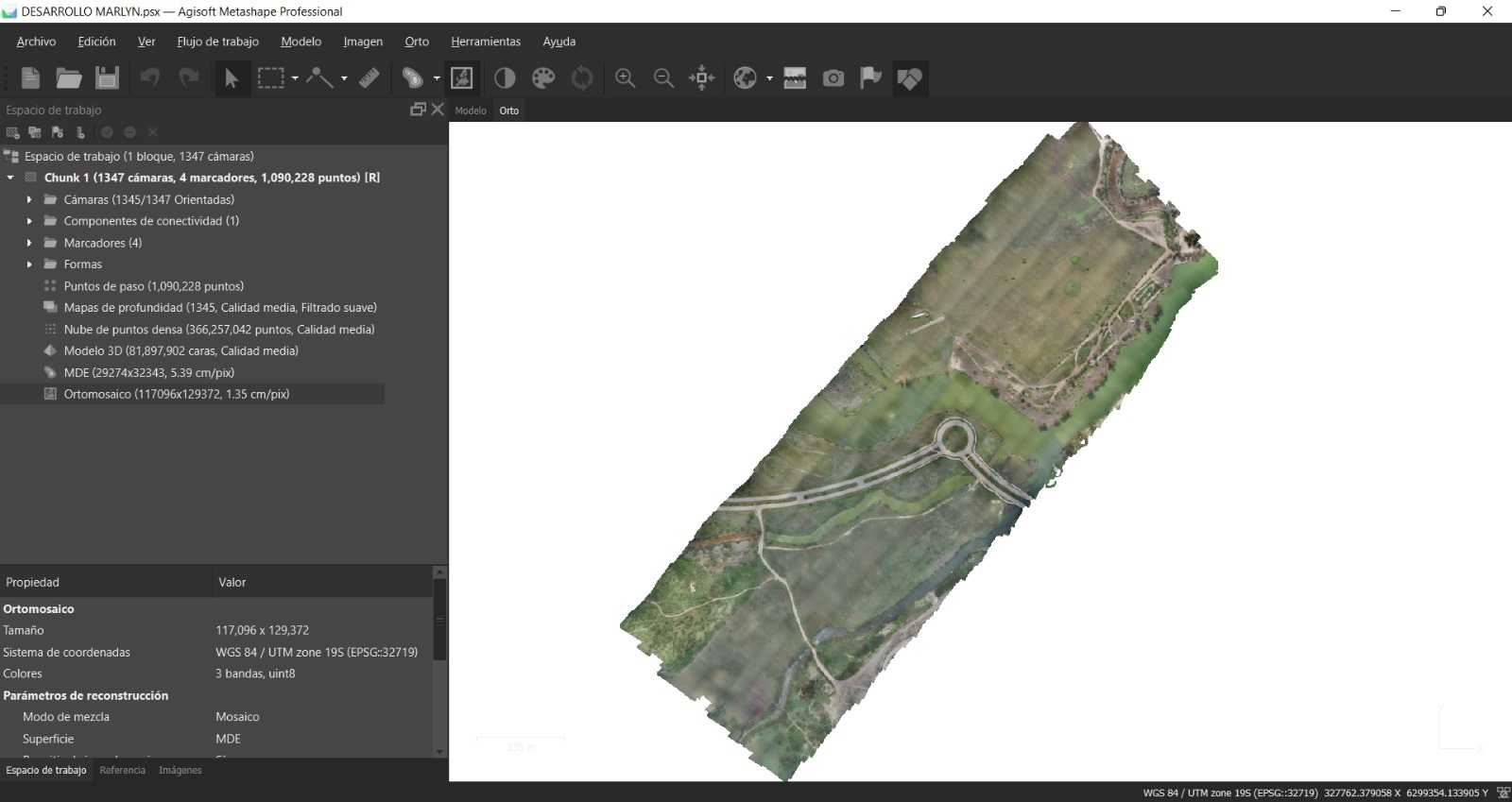
Agisoft Metashape (Software)
Agisoft Metashape es un software de fotogrametría utilizado para crear ortofotos precisas en topografía y cartografía. El programa procesa imágenes digitales para crear un modelo 3D preciso del terreno y, a partir de este modelo, genera un ortomosaico georreferenciado que puede utilizarse para la planificación de proyectos y el análisis de características topográficas. Además, el programa ofrece herramientas de procesamiento y análisis de datos, medición y generación de informes. Agisoft Metashape es una herramienta crucial en la creación de ortofotos precisas para topografía y cartografía, con la capacidad de procesar y analizar datos para obtener resultados detallados y precisos.
Programa Metashape de Agisoft
No se ha encontrado ningún artículo.
El proyecto
En el desarrollo de este trabajo, el primer paso fue seleccionar el lugar donde se realizaría el vuelo del dron. Luego de evaluar las opciones, se decidió realizar el vuelo en Laguna Caren, Santiago. Se eligió este lugar por ser una zona extensa, amplia y alejada de la ciudad, lo que permitiría un óptimo desempeño del dron, ya que le permite capturar grandes cantidades de terreno en una sola sesión. Con estas características, Laguna Caren se convirtió en el lugar perfecto para realizar el vuelo y obtener los datos necesarios para el proyecto.
Una vez sobre el terreno, el primer paso fue trabajar con los instrumentos GNSS para capturar los puntos de control del terreno (GCP) que se habían localizado previamente en sitio. Con la tecnología de los receptores GNSS utilizados, fue posible obtener coordenadas exactas, con precisión milimétrica. Para ello se utilizó la modalidad RTK, que implica la instalación de un receptor como base en un punto conocido, y otro receptor móvil para el levantamiento de los puntos de control. Gracias a la precisión y fiabilidad de esta tecnología, fue posible obtener un conjunto de puntos de control de alta precisión, que posteriormente serán utilizados para el control de precisión de la ortofoto que obtendremos.
Posteriormente, se colocó el dron en un lugar seguro y estable que garantizara un despegue y aterrizaje seguros. En ese momento, se estableció la estación de trabajo con el ordenador cerca del dron para revisar los parámetros de seguridad, crear la misión de vuelo y controlar el despegue y aterrizaje del dron, todo ello gracias al software Atmos Navigator .
Una vez finalizado el vuelo del dron sobre el terreno, se concluye el trabajo de campo y se procesan los datos obtenidos en la oficina. El primer paso es incorporar todos los datos capturados durante el vuelo, incluyendo los datos brutos del receptor GNSS Base, las imágenes capturadas por el dron y la información GNSS obtenida. Para ello, se utiliza el software Atmos Geotagger V2, que permite integrar todos los datos obtenidos en un único fichero para llevar a cabo el proceso.
Sobre el terreno (Chile)
A continuación, comienza el proceso de procesado de imágenes, utilizando la metodología PPK (Post-Processing Kinematics) para geoetiquetar con precisión cada imagen capturada con respecto a la coordenada Base conocida que podemos incluir dentro del software. Este proceso permite obtener una posición precisa en el sistema X, Y y Z para cada imagen, lo cual es esencial para la creación del modelo final y la generación de futuros productos cartográficos.
El procesado de imágenes con PPK es una técnica que permite corregir los errores de posicionamiento que puedan surgir durante el vuelo del dron, garantizando así que las imágenes estén georreferenciadas con gran precisión. Este proceso es fundamental para conseguir la calidad y precisión necesarias en la generación de la ortofoto.
Una vez obtenidas las imágenes geoetiquetadas y corregidas, procedemos a trabajar con el programa informático Metashape de Agisoft. En este programa, incorporamos las imágenes capturadas en el paso anterior para realizar el flujo de trabajo. El primer paso consiste en orientar las imágenes para que estén correctamente posicionadas.
Posteriormente, creamos la nube de puntos pasante, que consiste en un conjunto de puntos tridimensionales en el espacio que van a ser utilizados para la creación de la nube de puntos densa. Esta última se encarga de crear un modelo tridimensional del terreno, obteniendo una mayor precisión en su representación.
A continuación, creamos el modelo digital de elevación, que es un modelo tridimensional que representa la elevación del terreno. En este paso pueden identificarse las zonas más altas y más bajas del terreno, lo que permite comprender mejor la topografía de la zona.
Por último, se genera la ortofoto, que es un modelo digital donde el terreno se representa plano y corregido. Esta ortofoto es muy útil, ya que permite extraer medidas precisas y reales del terreno. De esta forma, se puede realizar un análisis más detallado de las características del terreno y obtener información valiosa para la toma de decisiones.
Resultados del proyecto
Ortofoto:
La ortofoto es un producto generado a partir de las imágenes captadas por el Drone Marlyn Cobalt , las cuales fueron geoetiquetadas con precisión utilizando la metodología PPK. Este producto se obtuvo gracias al uso del software Agisoft Metashape, y con ello se logró obtener una representación plenamente representativa del área de interés, que constituye una superficie de 108 Ha.
Ortomosaico:
Proyecto Ortomosaico
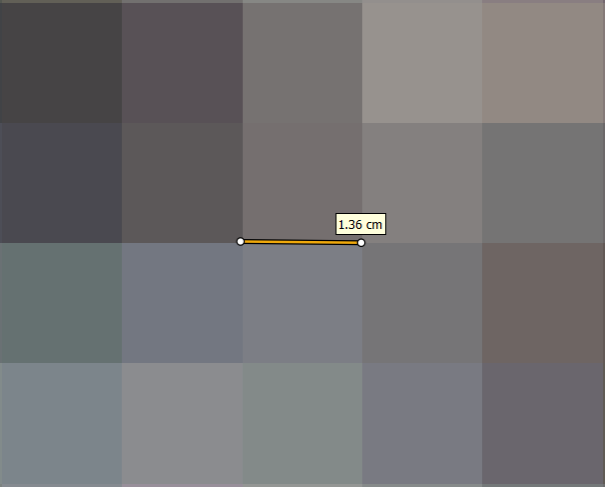
En el producto podemos ver el tamaño de la GSD que es de 1,3cm/px de resolución a una altura de vuelo de 100 metros sobre el suelo:
Representación GSD
Insertando las coordenadas de los PCG en el programa informático Agisoft Metashape se observa que la diferencia entre las coordenadas de éstos y el lugar donde se encuentra el vértice del PCG en la ortofoto es de 3,2 cm por término medio:
GCP en el software
En las siguientes tablas podemos observar el error generado en el total de los 4 puntos y para cada uno de ellos respectivamente.
Número
Error en X (cm)
Error en Y (cm)
Error en Z (cm)
Error en XY (cm)
Total (cm)
4
2.45612
1.08372
1.77130
2.68458
3.21628
Número
Error en X (cm)
Error en Y (cm)
Error en Z (cm)
Total (cm)
Imágenes (pix)
100
2.53248
-1.31494
-2.49093
3.78777
1.250(11)
101
2.26082
0.866184
-1.59563
2.89959
1.440(7)
102
3.24293
0.866184
-0.93669
3.46136
1.806(8)
103
1.44526
-1.27727
-1.70936
2.57723
1.610(8)
Total
2.45612
1.08372
1.7713
3.21628
1.52
Resultados de la encuesta sobre el proyecto
Conclusiones
Después de realizar todo el proceso de trabajo, podemos concluir que los resultados obtenidos fueron satisfactorios. En particular, la precisión obtenida en el producto final, la ortofoto, fue realmente excelente, alcanzando una precisión de 3 centímetros en comparación con los Puntos de Control Terrestre (PCT) colocados. Se trata de un resultado muy notable, ya que el área cubierta por el vuelo fue de 108 hectáreas y esta precisión se logró en un tiempo récord de sólo 40 minutos. Esto representa claramente una gran optimización del tiempo de trabajo sobre el terreno.
La rapidez del vuelo se debe a que se utilizó un dron de ala fija, lo que le confiere una mejor aerodinámica. Además, la calidad de las imágenes obtenidas fue excepcional gracias al sensor SONY RX1RII que se utilizó. Esta cámara es de gran calidad, lo que permitió conseguir una gran resolución en las imágenes.
Es importante destacar que este dron es muy versátil para la topografía de grandes áreas de trabajo, lo que lo convierte en una herramienta ideal para aplicaciones topográficas. En conclusión, el uso de esta tecnología permite mejorar significativamente el proceso de toma de datos y genera resultados precisos y fiables, lo que facilita enormemente el trabajo de los profesionales en el campo de la topografía.
No se ha encontrado ningún artículo.
Compartir el puesto:
Descubra por qué los líderes del sector eligen ATMOS